May 01, 2021
Surface Referencing Against Deformable Soft Bodies
Surface Referencing Against Deformable Soft Bodies: A low-cost, optical based solution for positional tracking of medical device contact along human skin.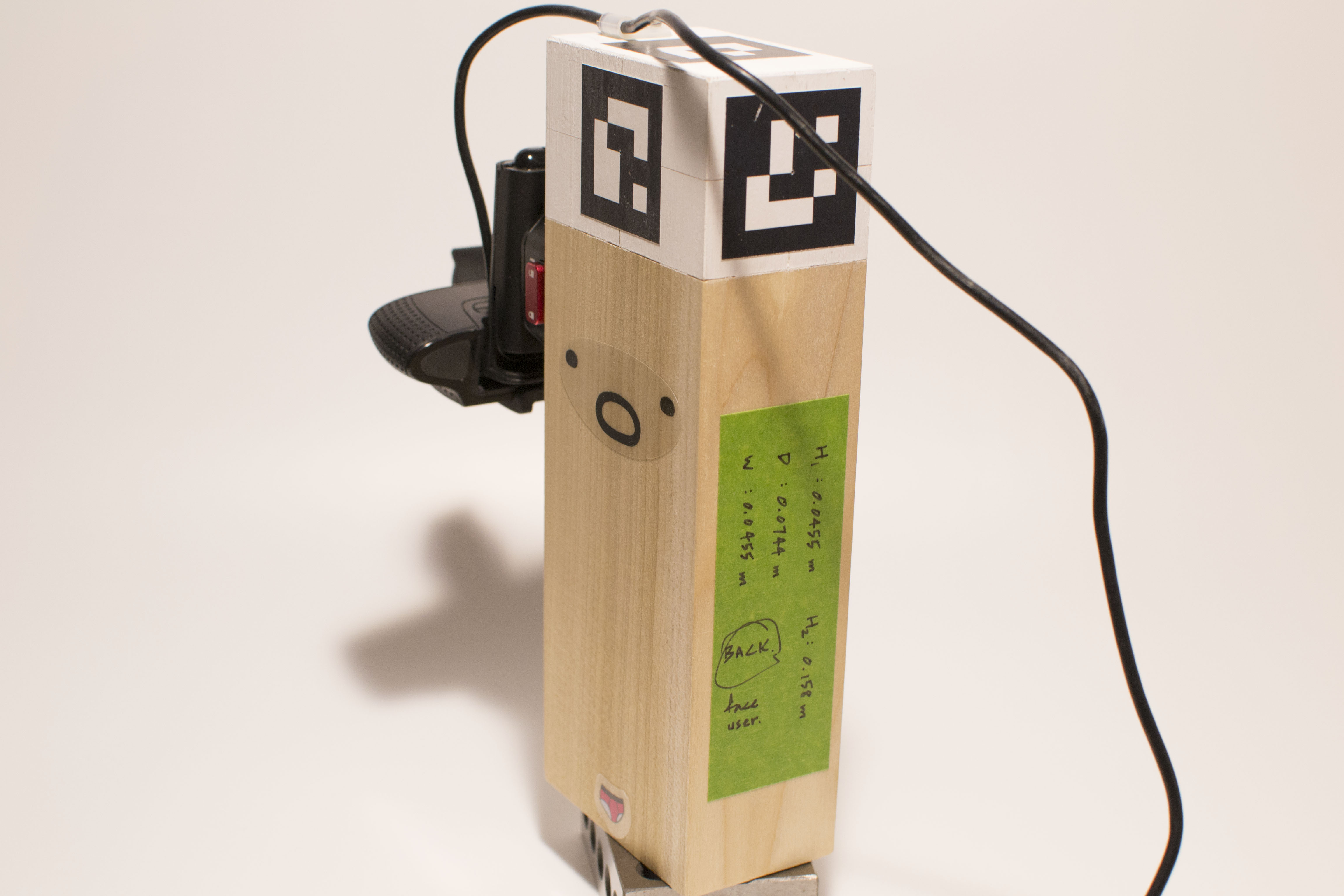
Introduction
Purpose: demonstrate feasibility of an optical positioning system based on surface referencing of a deformable soft body Application: handheld (radiometer) scanner for breast cancer screening need a method locating the point of contact on the skin Requirements:
- low cost: <$400
- good accuracy: +/- 0.5mm
- real-time
Radiometer vs Existing Scanners
Standard approaches — X-ray mammography and ultrasound imaging — produce images of internal tissue structure. Radiometer-based scanner only produces a heat map and no discernible ‘landmarks’. Localization is necessary for biopsy.
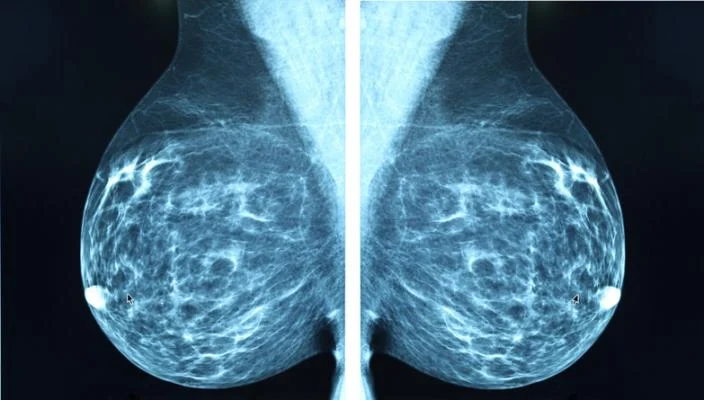
Image of internal tissue structure can be used for localization of wire or needle for biopsy
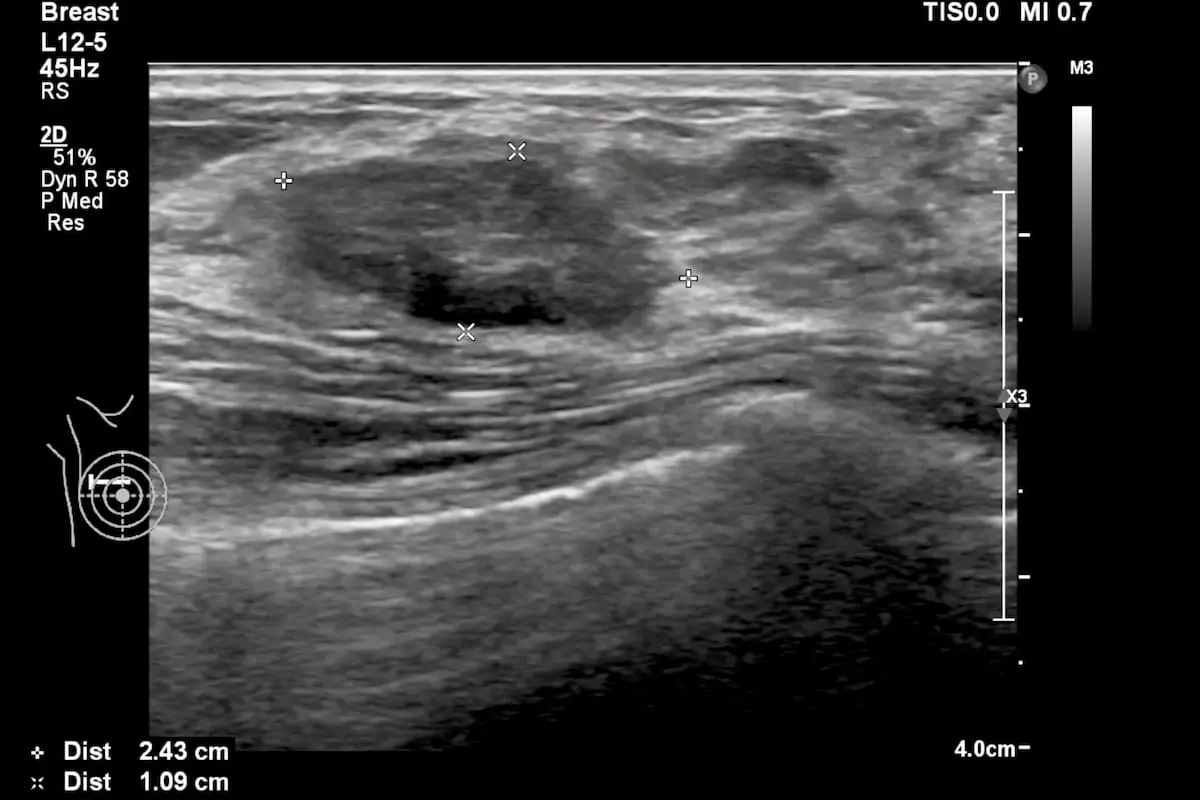
Image of internal tissue structure can be used for localization of wire or needle for biopsy
Heat map image does not produce discernible information for localization.
Motivation for Radiometer Approach
Keypoints for answering some FAQs
- Low-level radiation
- Detection based on visible discrepancy of tissue structure or calcification
- Ages 30+
- Radiation exposure limits frequency of scans
- Passive sensing, no radiation exposure
- Can detect hot spots before sizable formation of tumors(*)
- No age limit
- No limit on frequency of scans
(*) theoretically, can detect tumors before they are visible to other imaging techniques
Previous Localization Approaches
Previous approaches produced noisy/unstable localization as well as inadequate accuracy.
- significant measurement drift
- Magnetometer compensator is susceptible to interference with nearby metal
- From a 3rd person perspective, this method can produce a 3D scan & rendering of the entire scene.
- Unfortunately, the breast is not a rigid structure so a 3D snapshot is not a reliable solution.
Insights from Previous Attempts
Previous attempts were revealing as to how to design a better position tracking system.
Measurement approach should be adaptive to elastic nature of skin
Vision-based approach achieves high-resolution at low cost
Leverage physical proportions to achieve “high gain” measurement
Concept: Camera On-Board
Observing key lessons learned from previous attempts, I produced concept sketches of a camera-on-board solution. Camera is mounted directly onto the device, and looks down on fiducial markers along the surface on which the device sits. Direct referencing: Close coupling between essential parts of the system results in high robustness. High gain geometry: Small physical perturbations correspond to large pixel movement.
Concept sketch for a camera-on board system
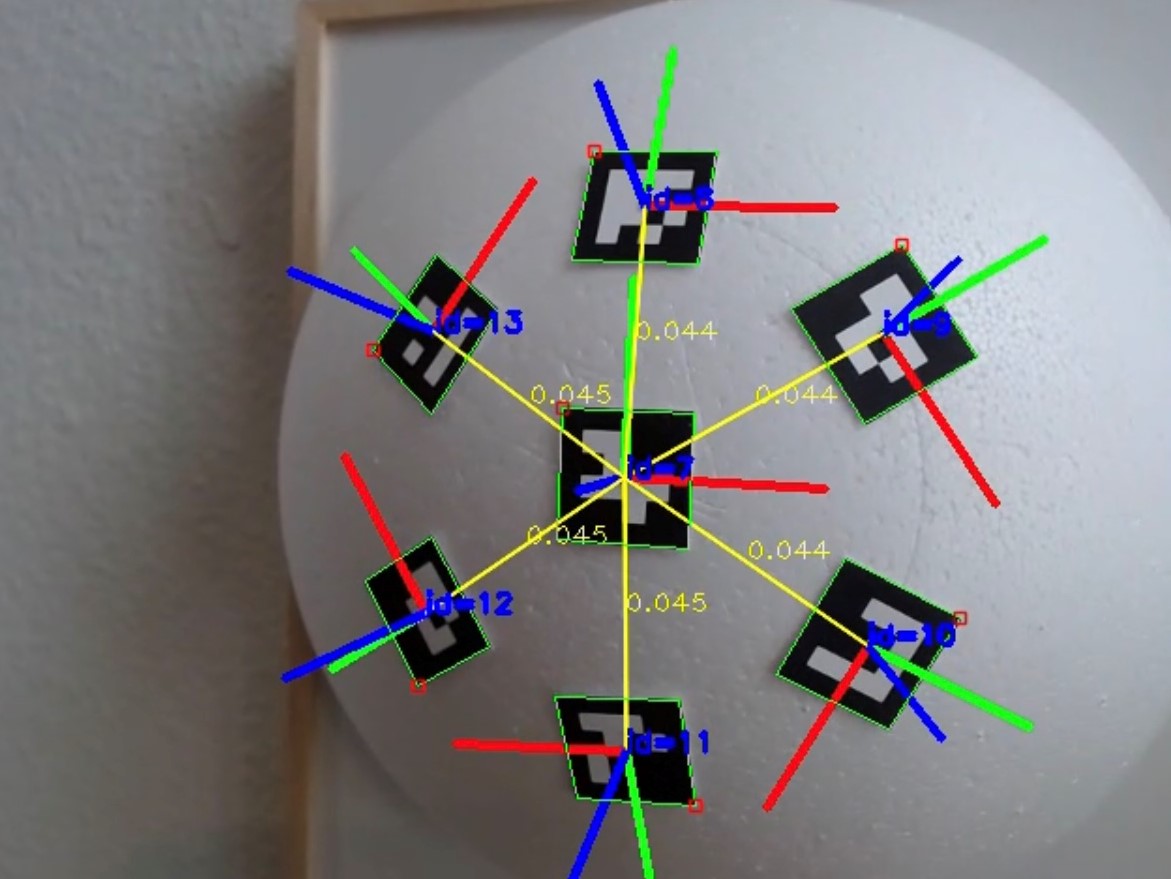
Interpolating between multiple fiducial markers on the skin surface enables position estimation along the surface even under strain.
Simple interpolation technique
Components
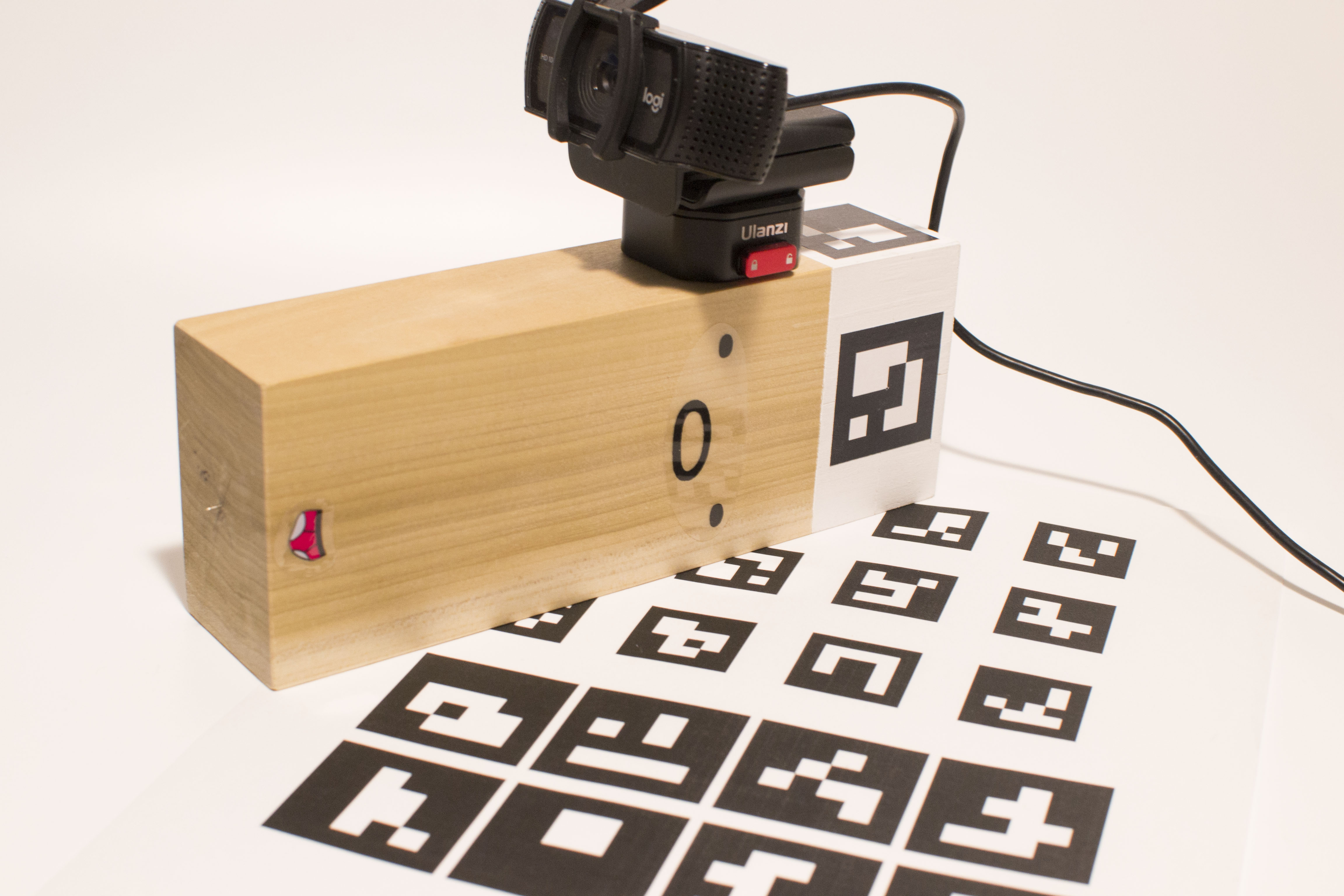
Custom made components for the purpose of demonstrating the experimental system.

Breast phantom is cast from gelatin with a similar formulation as ballistic gel — giving an elastic behavior analogous to human flesh.
Shown is a carefully dimensioned wooden block, representing the radiometer device. A camera is mounted on top as the observer. In the foreground are various sizes of fiducial markers. The smallest of which are used on the breast phantom.
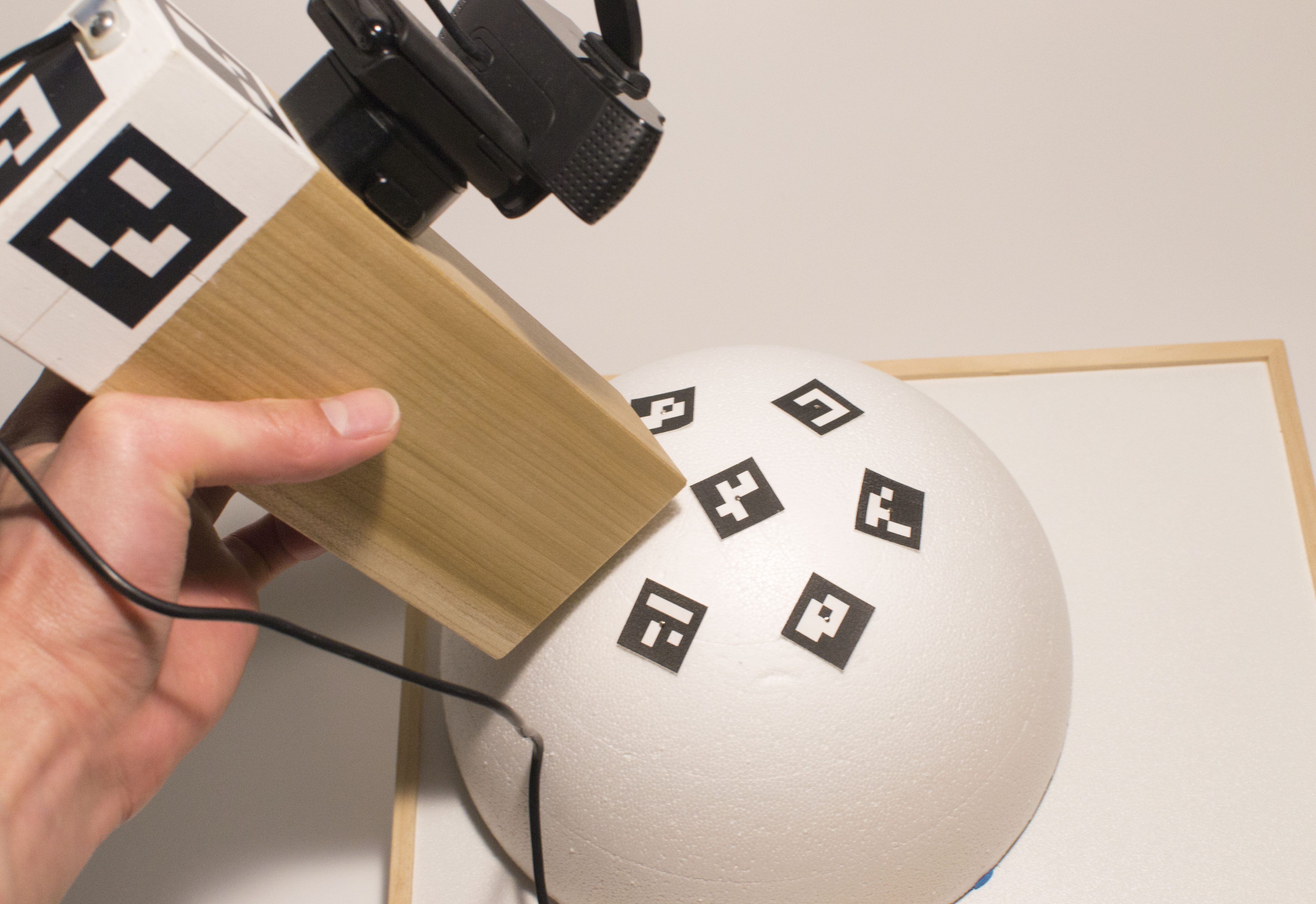
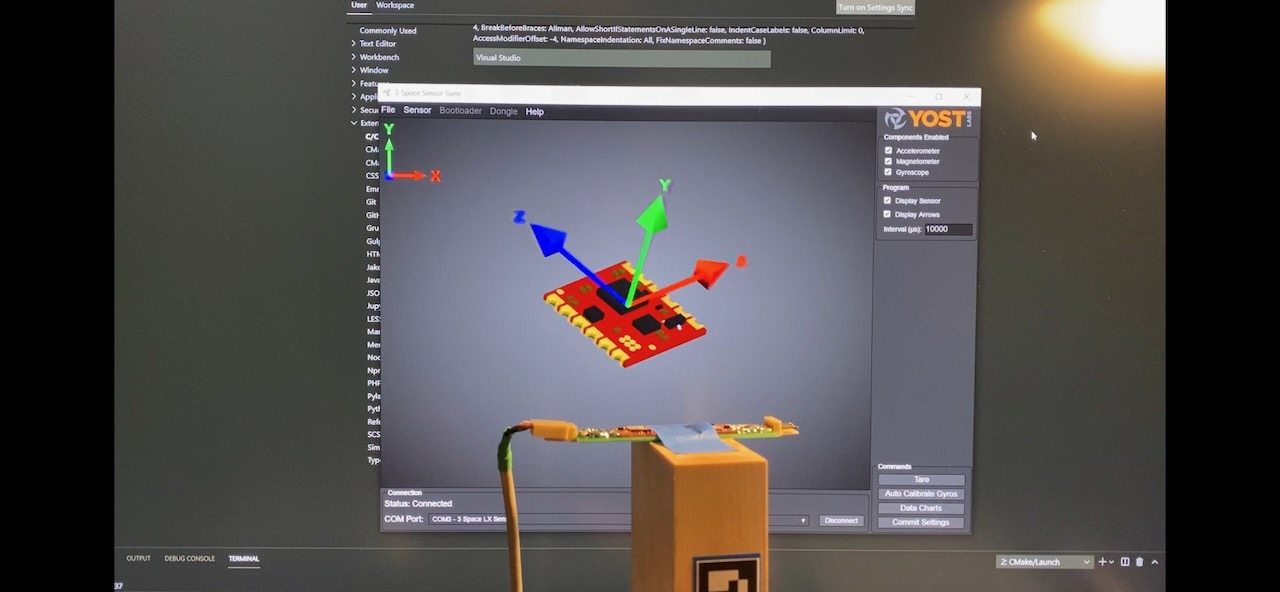
System in Action
The system fully assembled and in action. Left: view of the system from a 3rd person perspective. Right: perspective from the on- board camera.
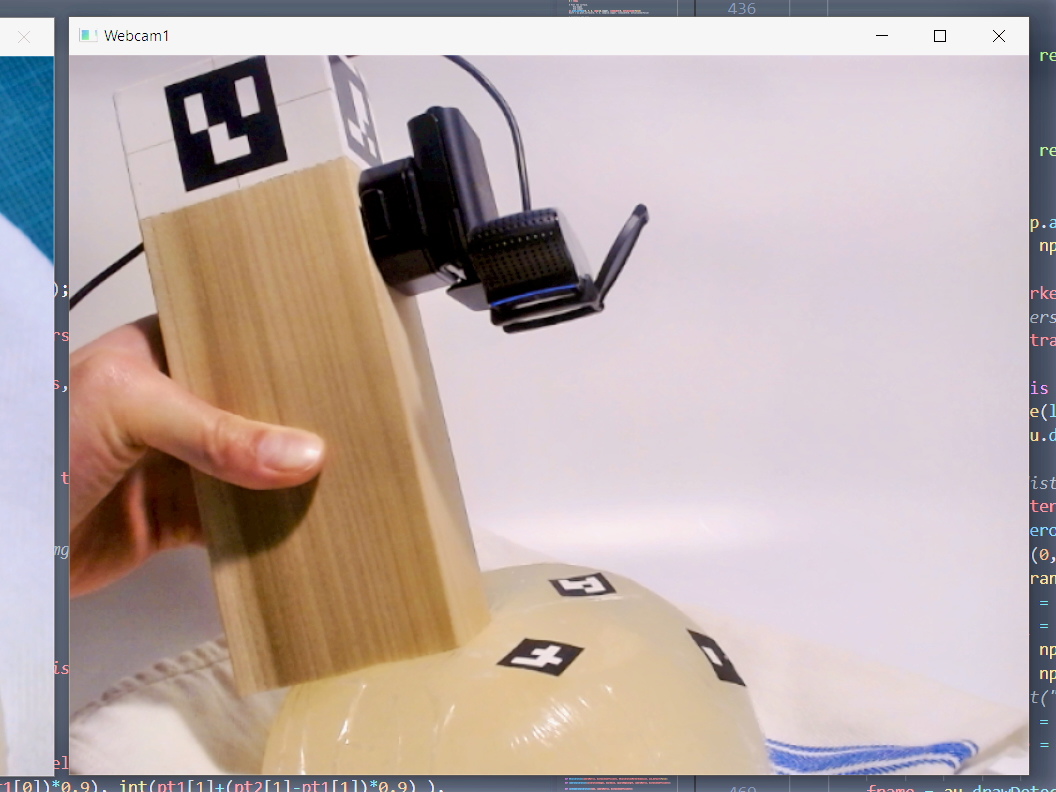
Mounting camera on-board produces position measurements that are closely coupled between device body & patient skin. Small physical perturbations correspond to large pixel movement.
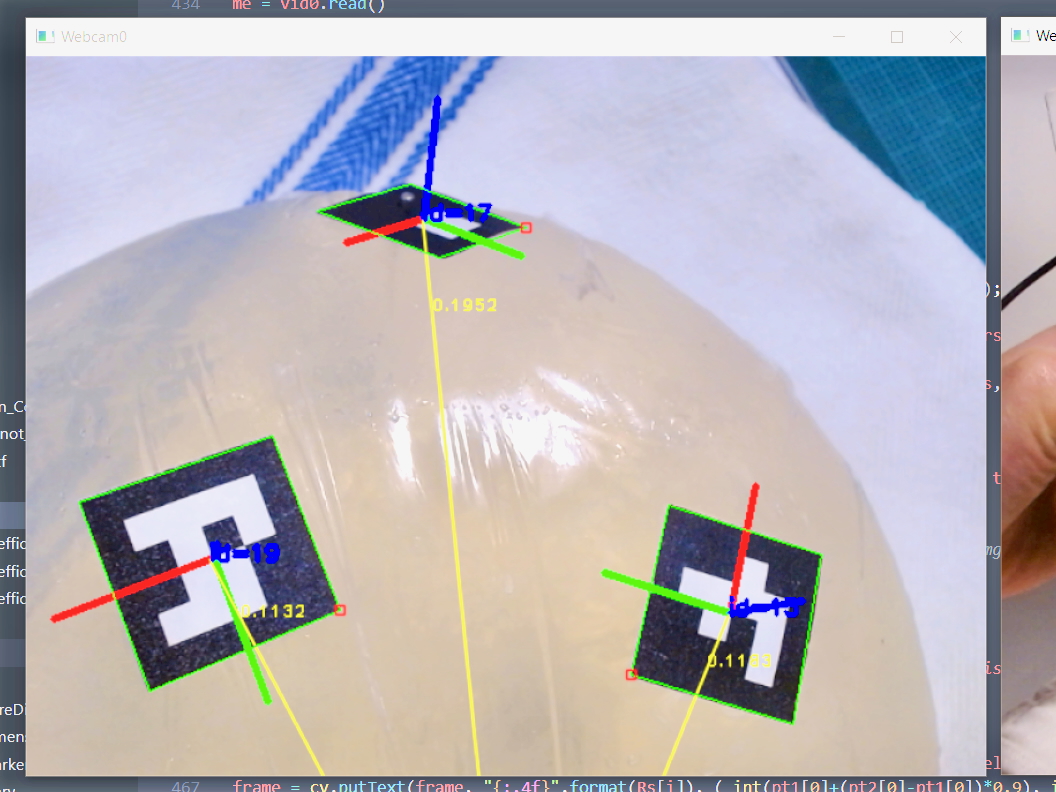
Even low-cost webcams are capable of sub-millimeter measurements when geometry of the system is appropriately leveraged. Cost of webcam, Logitech C920: $60
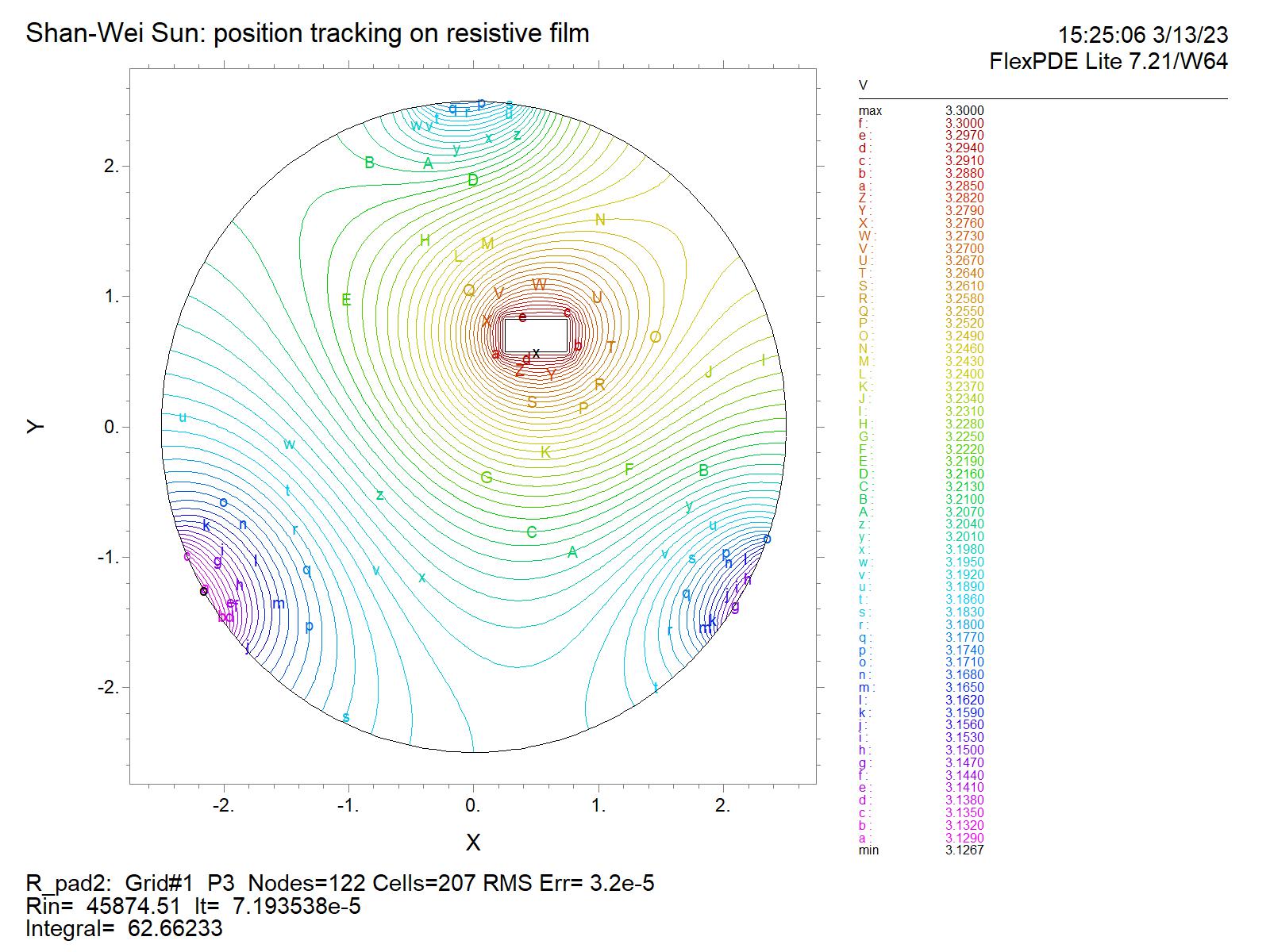
Results
Purpose: demonstrate feasibility of an optical positioning system based on surface referencing of a deformable soft body
- Requirements:
- low cost: <$400
- good accuracy: +/- 0.5mm
- real-time
-
Results:
- cost of demo: $80
- accuracy: +/- 0.5mm can be significantly improved by further tuning
- real-time: fiducial markers require minimal run-time computation
- works on a deformable surface
- low cost of integration
- total time of demo completion: 4hrs
Appendix
A few tidbits for the observant audience.